포르쉐 카이엔 ACC 센서 PORSCHE CAYENNE ACC Adaptive Cruise Control
포르쉐 카이엔 어뎁티브 크루즈컨트롤
\ 1,300.000 정품 신품 수입 비용포함 주문시 10일 소요됩니다
ACC 추가 장착 시 필요한 부품 입니다
| ||||||
|
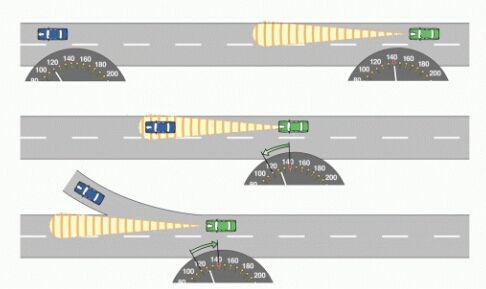
ACC는 크루즈 컨트롤을 기반으로. 차분 :. 홀트 차까지 전방 차량, ACC 자동 브레이크 및 드라이버 거리의 세트를 유지한다 . 도플러 효과에 물리적 기반 측정 통해 도플러 효과 (송신 및 수신 신호 사이의 다른 파장) 허용 상대 속도를 사이를 ACC - 차량과 물체를 결정한다. 객체가 역 반사 된 파의 주파수가 증가쪽으로 이동되는 경우. 객체가 송신기로부터 멀리 이동하면, 반사파의 주파수. 낮다 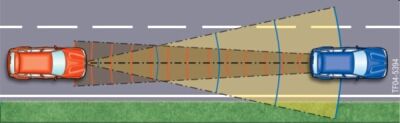
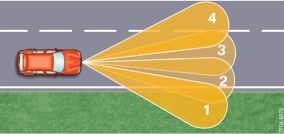
제어판을 통해, 운전자가 원하는 속도 및 앞 차량에 원하는 거리를 선택합니다. 조종석의 디스플레이는 작동 상태 및 설정하는 것을 드라이버에 통지합니다. 운전자의 원하는 속도에 더하여 차량 전방에 부착되는 시간 간격과 같은 간격을 선택한다. 선택할 수있는 세 가지 레벨이 있습니다에서 : 1 초, 1.5 초, 2 초와 2.5의
| ||||||
| ||||||
레이더 센서의 거리 (D) 및 상대 속도 (v에있는 데이터 검출 이 REL ) 전방 차량을 결정한다. 이로부터 남은 시간은 사고를 확인합니다. 이 TTC (충돌 시간)이라고합니다. 이 시간은 용이하게 계산 될 수있다 :
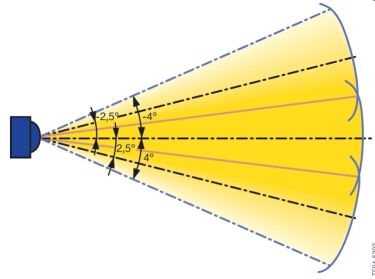
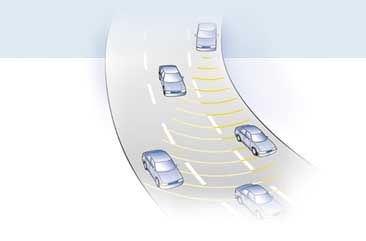
레이더 센서 (LRR - 장거리 레이더)는 중심 축으로부터 +/- 15도 각도로 250m의 거리되기 위해 미리 차량을 검출한다. 전자 안정성 프로그램 ESP의 센서 관련 ACC 차량을 선택하기 위해 이동 방향에 대한 정보를 제공한다.
ACC는 편의 시스템으로 설계되었습니다. 가속과 제동 개입의 강도는 의도적으로 제한됩니다. 드라이버는 ACC의 지원에도 불구하고, 따라서 모든 상황에서 경고 유지해야합니다. 그는 항상 운전에 대한 책임과 현재의 기상 조건에 자신의 운전 스타일에 적응해야한다. 스티어링 기동이나 무거운 제동에 대한 결정 그는 자신을 계속한다. 드라이버는 항상 자동 제어를 통해 우선 순위를가집니다. 가속 페달의 작동은 차량이 평소와 같이 가속. 당신이 가속 페달에서 발을 떼 경우, ACC는 다시 구동 속도를 조정합니다. 브레이크 페달 또는 ACC 제어 패널의 빠른 탭으로,이 시스템은 단순히 끌 수 있습니다. | ||||||
| ||||||
그것은이 지역에 앞으로 많은 혁신적인 변화를 올 것으로 가정합니다. 들어 고급 비상 제동 레이더 센서가 이상적이다. 예산이나 ACC가 사용되는 광학 LIDAR 측정 방법으로 올 수있다. 이 자외선 (UV) 또는 적외선 (IR) 범위에서 동작한다. | ||||||




- 더 많은 제조 업체 : ContiTeves, BOSCH, VDO, 루카스, MAN,
- 폭스 바겐 또한 자동 거리 조절 (ADR)와 메르세데스 DISTRONIC로 명명
- 그런데 : 1998 년 ACC 선구자 인 메르세데스 S 클래스였다.
'벤츠및수입차 관련부품 판매' 카테고리의 다른 글
| VCDS 아우디&폭스바겐 전문가용 진단기 (로스텍 오리지널 정품) (0) | 2014.12.01 |
|---|---|
| 포르쉐 파나메라 GTS 리어스포일러 2014 Porsche Panamera GTS Rear Spoiler (0) | 2014.10.25 |
| 아우디 어뎁티브 크루즈 컨트롤 AUDI adaptive cruise control AUDI ACC 아우디 ACC (0) | 2014.10.22 |
| 벤츠 7단 미션 밸브바디 일렉트로킷 Merceds-Benz Original Mercedes New 7g Gear 722.9 (0) | 2014.09.25 |
| 벤츠 오리지널 진단기 스타 컴펙트 C5 SET (0) | 2014.09.24 |